During the last decades, the amount of easy oil has decreased significantly, leaving challenging oilfields that requires complex drilling operations to enable safe and effective drilling. Such challenging oilfields are often characterized by narrow pressure windows, causing a necessity for accurate pressure control to avoid breaks in the rock formation and/or taking influx of formation fluids and gas. An enabling technology for drilling these kinds of wells are managed pressure drilling (MPD). Contrary to conventional drilling techniques where the downhole pressure is controlled by changing the fluid mud weight, MPD offers faster and more accurate control by manipulation of a back pressure choke.
Critical events, such as gas influx, loss of mud or other failures, still needs to be handled robustly to facilitate safe and effective well control actions. Focusing on the gas influx scenario, where even small gas amounts change the pressure dynamics in the well significantly [1], the correct well control action is to increase the downhole pressure, stopping the influx. Adaptive controllers offers the possibility to update the controller tuning in real-time to maintain pressure control performance in the event of changing pressure dynamics, being of vital importance for performing safe good control actions. A non-adaptive controller, on the other hand, will experience decreased pressure control performance during these events, and might cause severe oscillations, or even unstable behavior. Moreover, an adaptive MPD solution offers the possibility to continue drilling safely even after handling of gas influx, significantly reducing the non-productive time during drilling.
Adaptive Control
My work up until now has mainly focused on handling the changed pressure dynamics due to gas influx robustly with adaptive control. The figure below shows the results of a non-adaptive fixed-gain controller from flow loop data during a gas influx. The controller was tuned to have good performance without gas, which can be seen in the first ramp-down, however, at 15 bar pressure a small amount of gas is injected into the flow loop, causing significant oscillations in the following pressure ramps. One of the main objectives of my Ph.D. is to, by robust adaptive control, to maintain pressure control performance during such events.
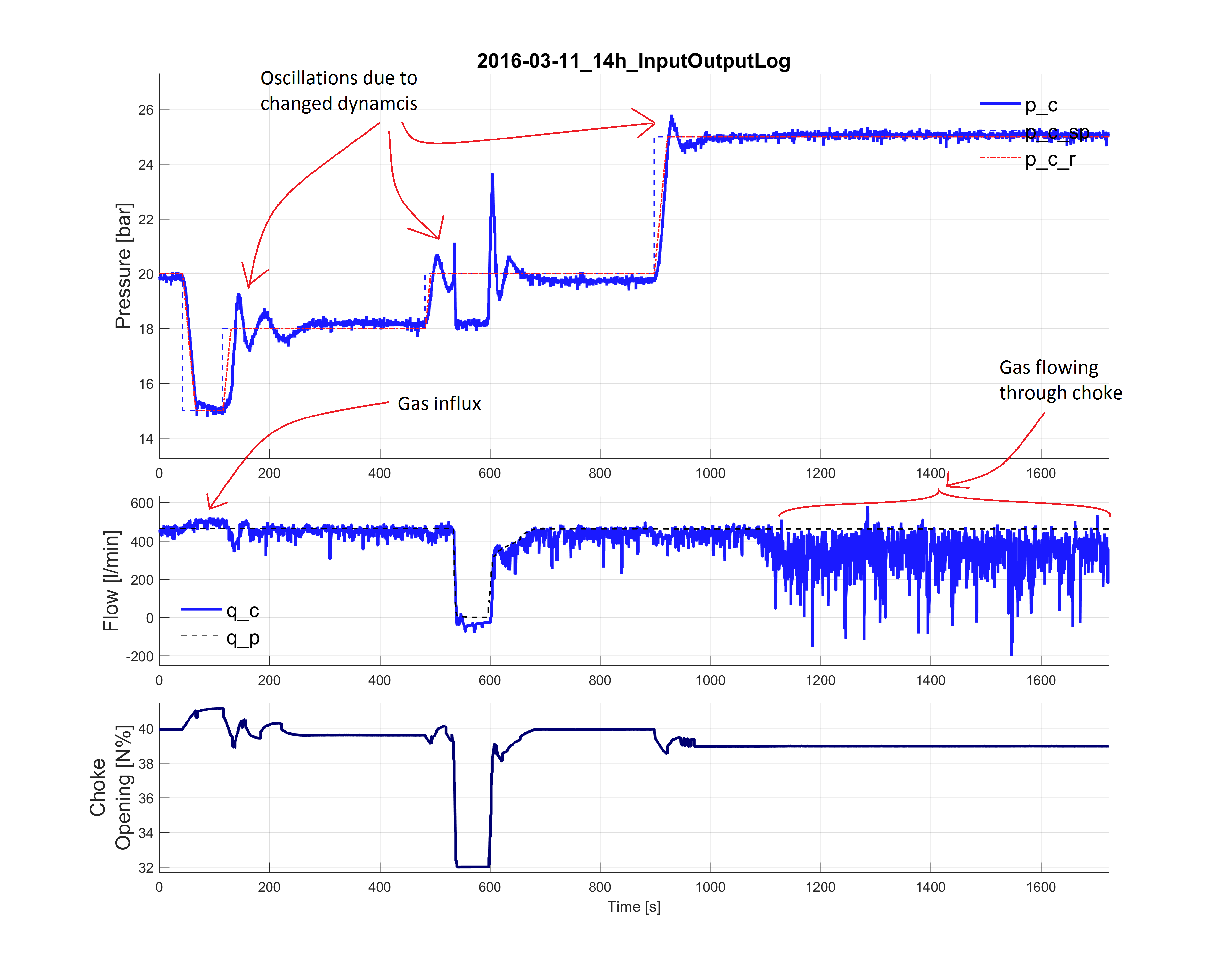
Field data showing pressure performance during gas influx using a non-adaptive controller. The gas influx happens during the set-point change down to 15 bar at the beginning of the scenario and causes pressure oscillations in the following changes in set-points due to changed dynamics. The ramp-down of flow after 500 seconds emulates a connection, and the noisy flow measurements after 1100 seconds indicate that the gas is flowing through the choke manifold.
Adaptive control
Adaptive control has been around since the 1950s, where it emerged as an idea for designing autopilots for supersonic aircraft [2]. Since then, there has been much development within adaptive control methods and stability analysis. Recent progress in the aircraft industry, led by among others Eugene Lavretsky [3], has spiked a new interest in the application of adaptive control, in which I also take part.
In the following figures, a simple example employing the methods developed in [3] can be seen. The basic idea is to combine a robust baseline controller with an adaptive algorithm, ensuring stable and robust behavior for a large range of operating point, while the adaptive controller recover performance in the case of unmodeled dynamics. In the simulation results shown below, the bulk modulus of the fluid is only 10% of what the controller was designed for, however, the adaptive controller recovers most of the performance in only one step change of 2.5 bar.
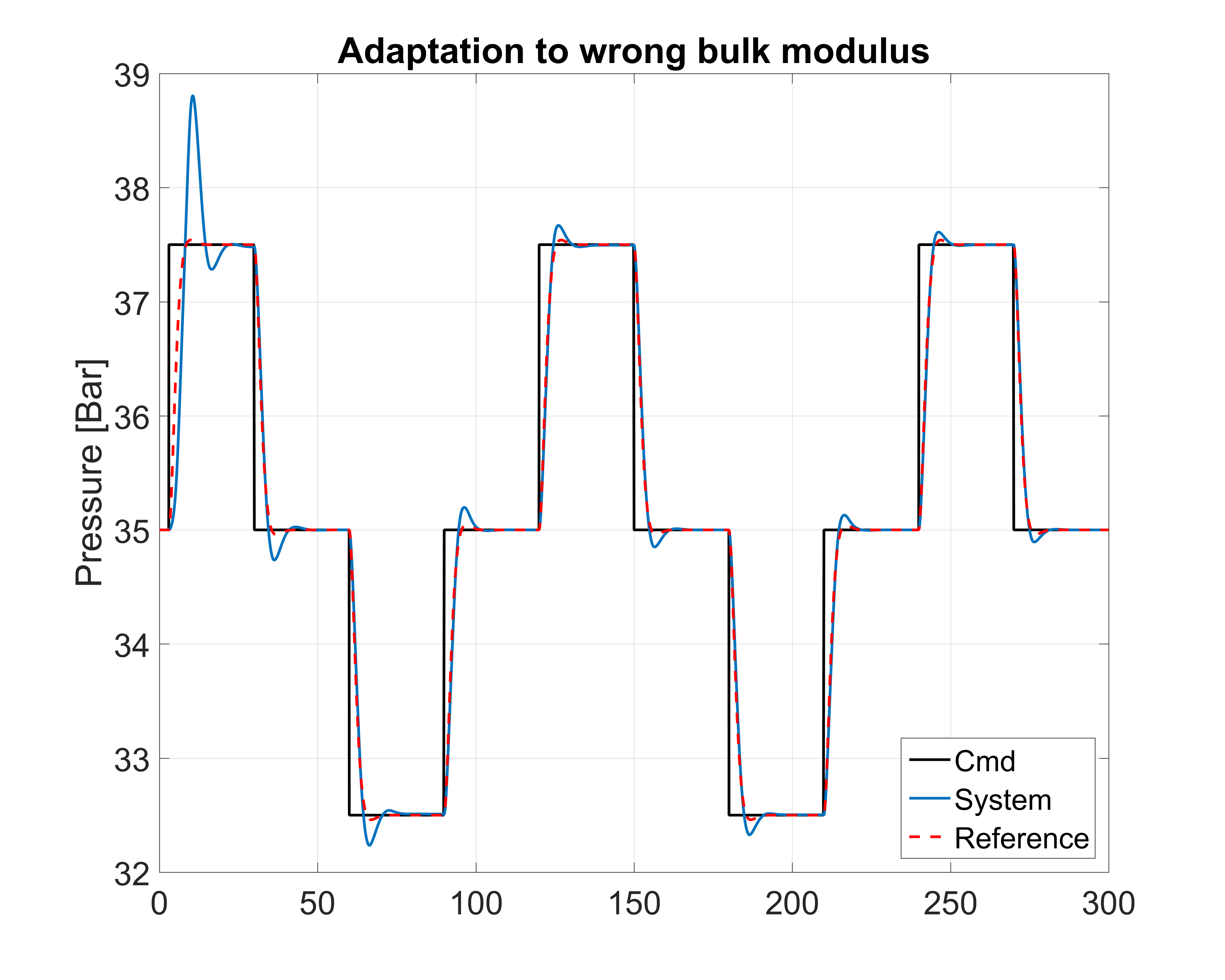
Pressure control simulation with observer based loop transfer recovery. At the beginning of the simulation the bulk modulus is 10 times smaller than used for design. The adaptive controller reduces oscillations significantly.
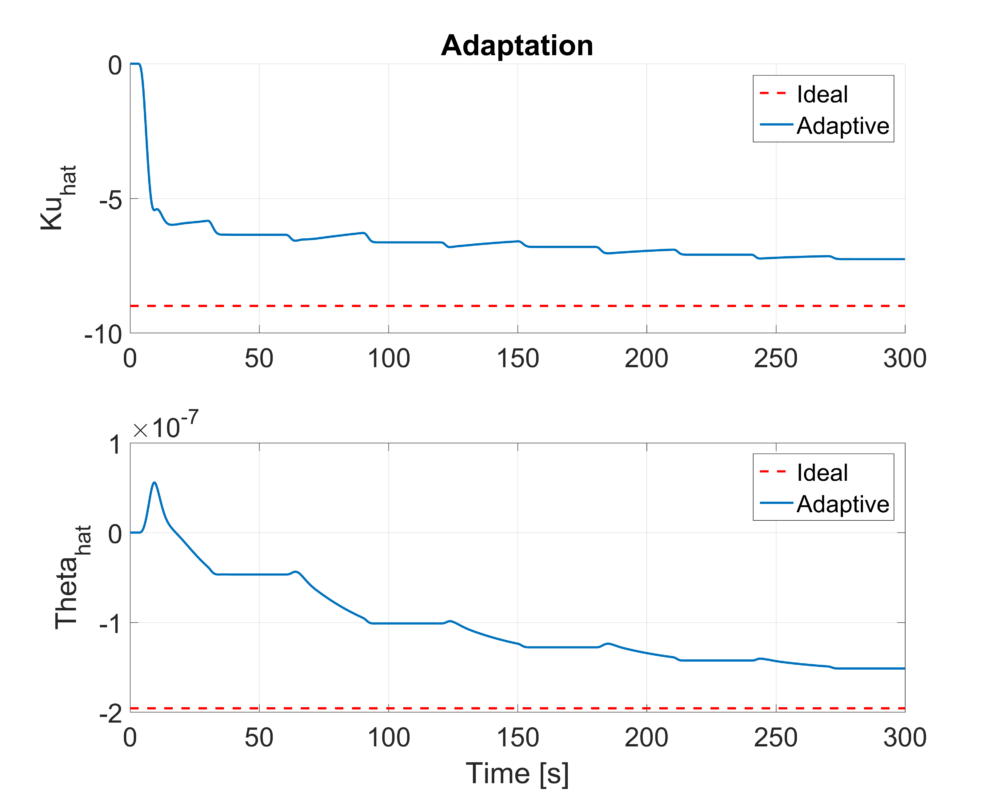
Adaptive parameter development in a observer based loop transfer recovery controller scheme. The parameters can be seen to approach their ideal values.
About myself
Originally from Eide, a small town between Molde and Kristiansund in Møre og Romsdal, I moved to Trondheim to pursue a master's degree in Engineering Cybernetics at NTNU in 2009. In June 2014 I earned my master's degree with the thesis "Topic of hysteresis modeling and identification for nanopositioning applications", where the main results were published in [4]. Later that summer I joined Kelda as a research engineer, shortly followed by starting an industrial Ph.D. in collaboration between Kelda, NTNU and the Research Council of Norway. As a part of my PhD studies I have spent 4 months at one of the worlds leading technological universities, the California Institute of Technology (CalTech), working with Dr. Eugene Lavretsky, a senior technician at Boeing Phantom Works (and one of two authors of [3]), and Caltech Professor Richard Murray.
Me together with Richard Murray and Eugene Lavretsky during my 4-month research visit to Caltech.
References
- Stamnes, Øyvind Nistad. "Nonlinear Estimation with Applications to Drilling." Ph.D. thesis, Norwegian University of Science and Technology (NTNU) (2011).
- Åstrøm, Karl. "History of Adaptive Control." Encyclopedia of Systems and Control, Springer (2014).
- Lavretsky, Eugene and Wise, Kevin. "Robust and Adaptive Control with Aerospace Applications", Springer (2013).
- Stakvik, Jon Åge, et al. "On Implementation of the Preisach Model: Identification and Inversion for Hysteresis Compensation." Modeling, Identification and Control 36.3 (2015): 133.